
This project has been reported by the Forbes and Steve-rosenbaum.
Forbes: Can A Robot Find You Love? NYU’s ITP Winter Show Says It Can.
Steve Rosenbaum: Techno Wonders at the ITP Winter Show
The Introduction video can be found here
Homemade Robotic Hand_new_version_introduction2 from Fengyuan Zhu on Vimeo.
Concept
One of the biggest distinction between human-beings to other creatures is that human have hands. Unfortunately, not everyone have two hands. Though 3-D printing is very popular in the current age, it is still not available for everyone to take usage of it.
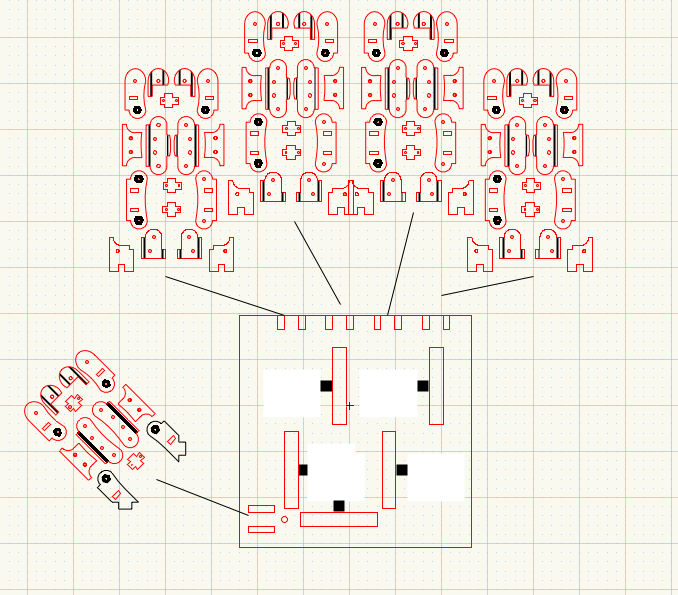
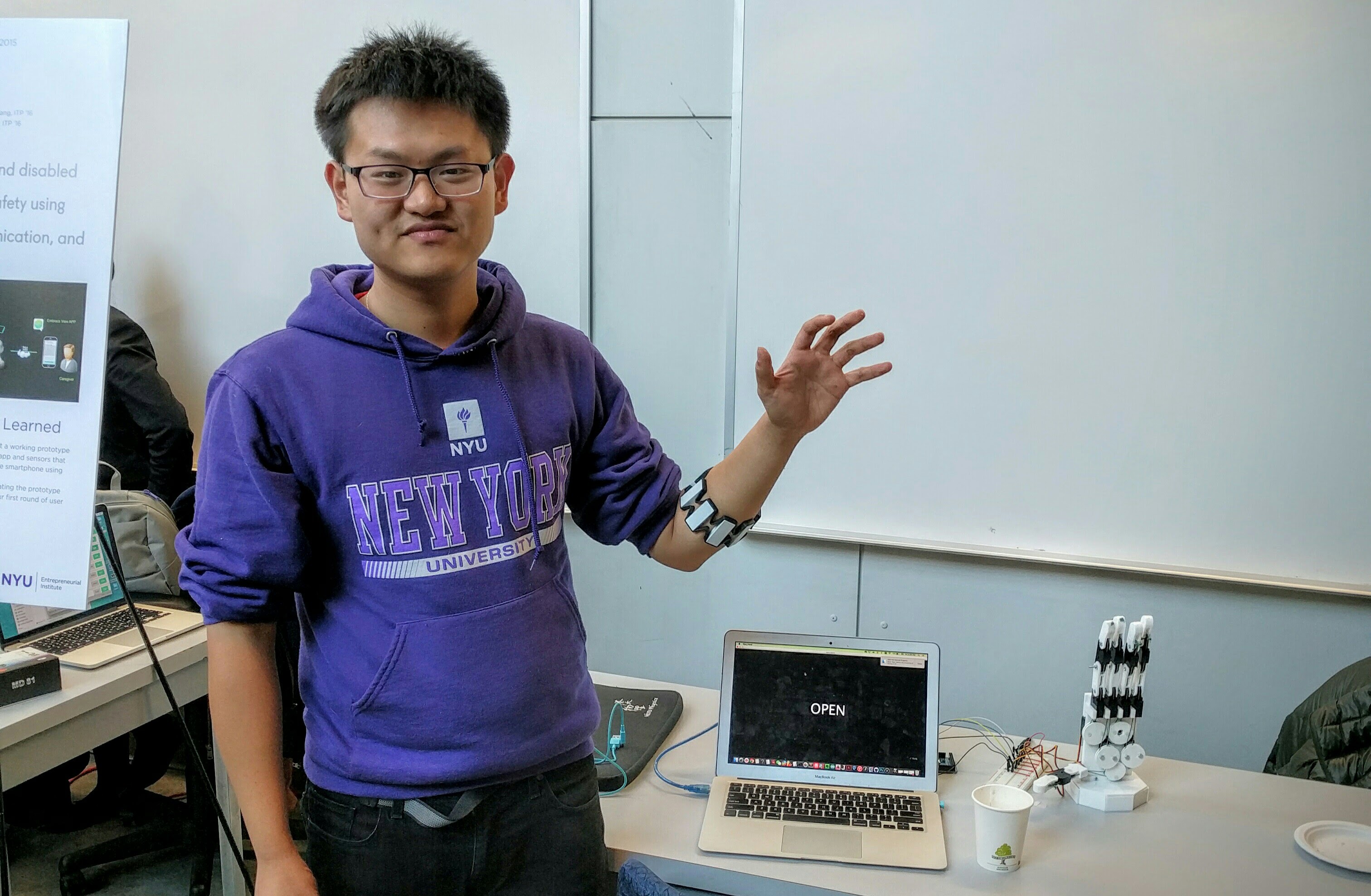
We designed a Low-cost Robotic Hand, with only require piece-by-piece materials and standard parts which can be easily got by everyone, make it available for everyone to duplicate it only with cardboard, scissor and parts bought in Amazon. We also make a linkage between Myo and our Hands, in order to make the hand controllable by the residue muscles that the most disables have.
Also, in order to make the whole staffs can be played by normal people, we also designed a control software in LeapMotion, and also make a simple game for users to have fun.


Current Result
We designed a 7-freedom hand, and link it to the Myo, performance as what we trained before usage. We also designed a wrist for the robotic hand, and also added a Leapmotion for player’s to have fun.

And we got a very good feedbacks during the show, people like it and have fun with it.
Homemade Robotic hands, Players during the show1 from Fengyuan Zhu on Vimeo.
Basically, it works well, with a 50 watt power supply and a transmission between the computer. It is easy to make a wireless connection directly to the arduino, but I still use the computer for a linkage, in order to make it debuggable.
Next Step
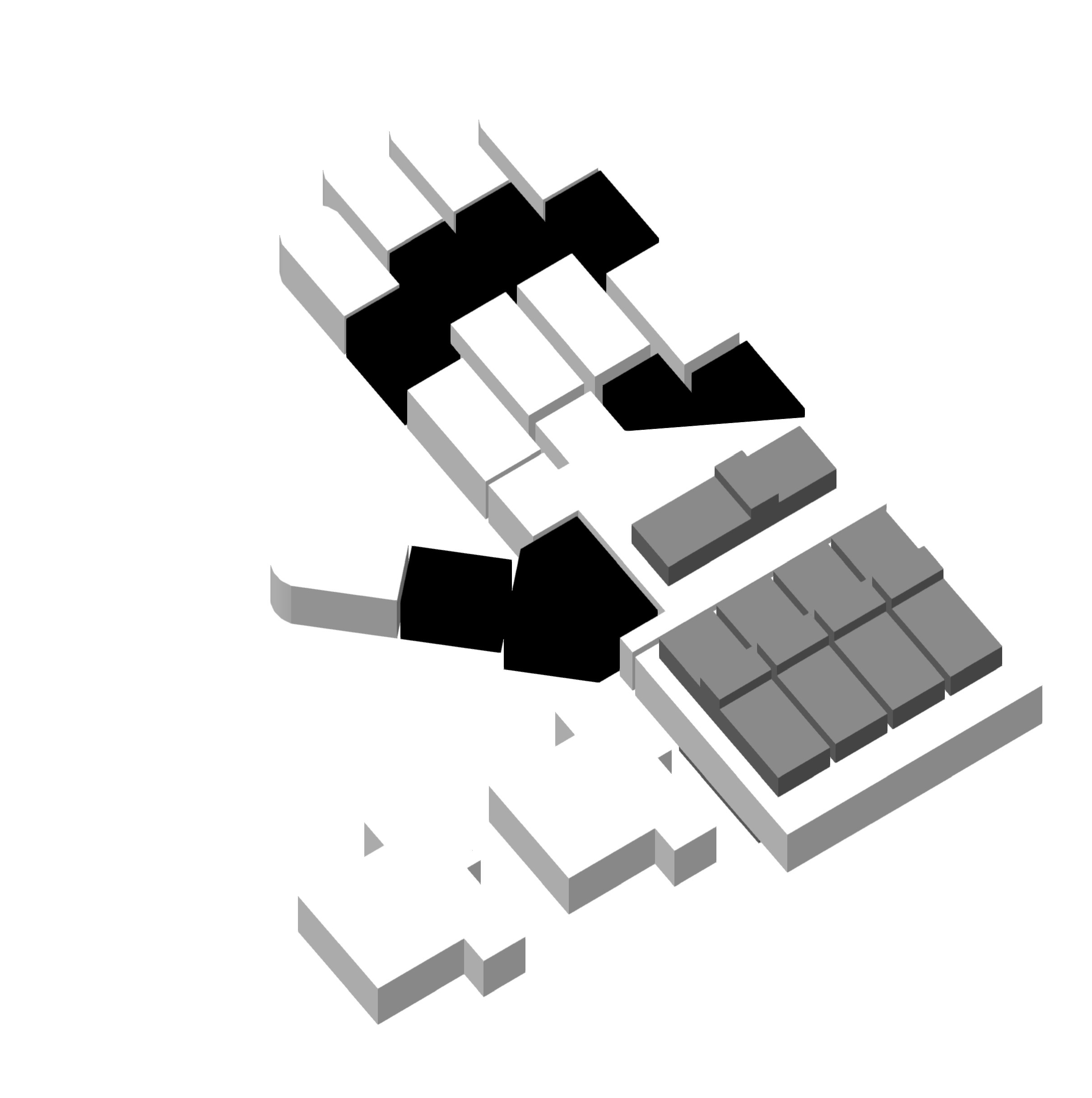
- more freedom version, like the scretch below:
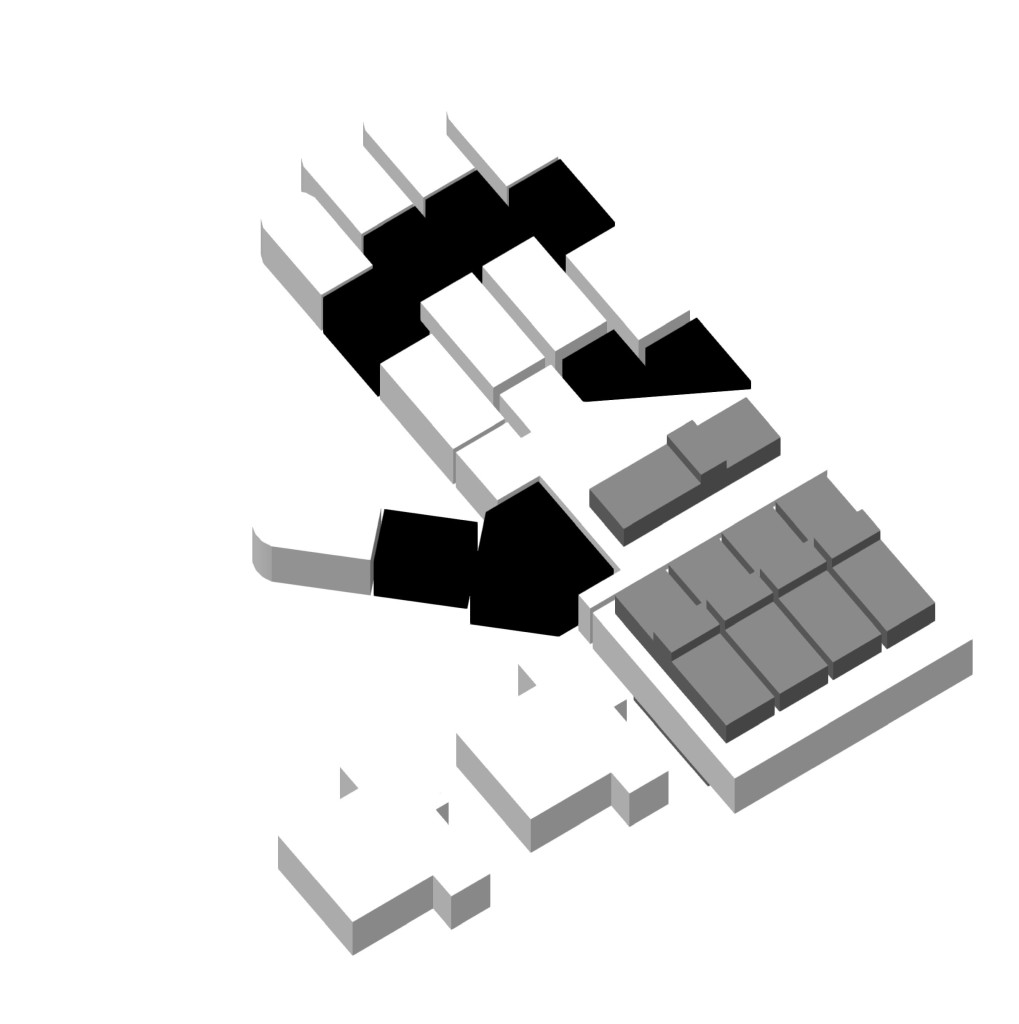
- A 3D printing version, for soft-version and a rough wall idea
- A cardboard version, for open source and kickstarter if possible
- Publish the staffs as an open-source version
—————–Belows are processing blogs——————–
Updated on Dec 20th
A brief introduction video, without wrist
During the show on Dec 4th, I tested the whole system to many people, found that different people need a totally different adjustment to the Myo, and the hand is not so robust, still need some progress.
Homemade Robotic Hand from Fengyuan Zhu on Vimeo.
Updated on Dec 16th
Wrist designed, added and first test passed!!!
But some protection will be needed for it
Wrist from Fengyuan Zhu on Vimeo.
Updated on Dec 6th
A stage-video generated, for the ITP Winter Show:
Homemade Robotic Hand from Fengyuan Zhu on Vimeo.
Updated on Dec 4th
A good demo show in NYU Prototype Funding Show:
Updated on Nov 23rd
The hands seems to work properly with this structure, another power supply should be applied for this project
Updated on Nov 14th
Changed a liner nuts here

It WORKS!!!!!
first move from Fengyuan Zhu on Vimeo.
Updated on Nov 1st
The last version broken down, for those reasons:
- Weak Servo
- Nonlinear Mechanical stretch
So I think I need to make another version of the pump, still focus on the Laser-Cut approach
Belows are updated before Oct 21st, 2015
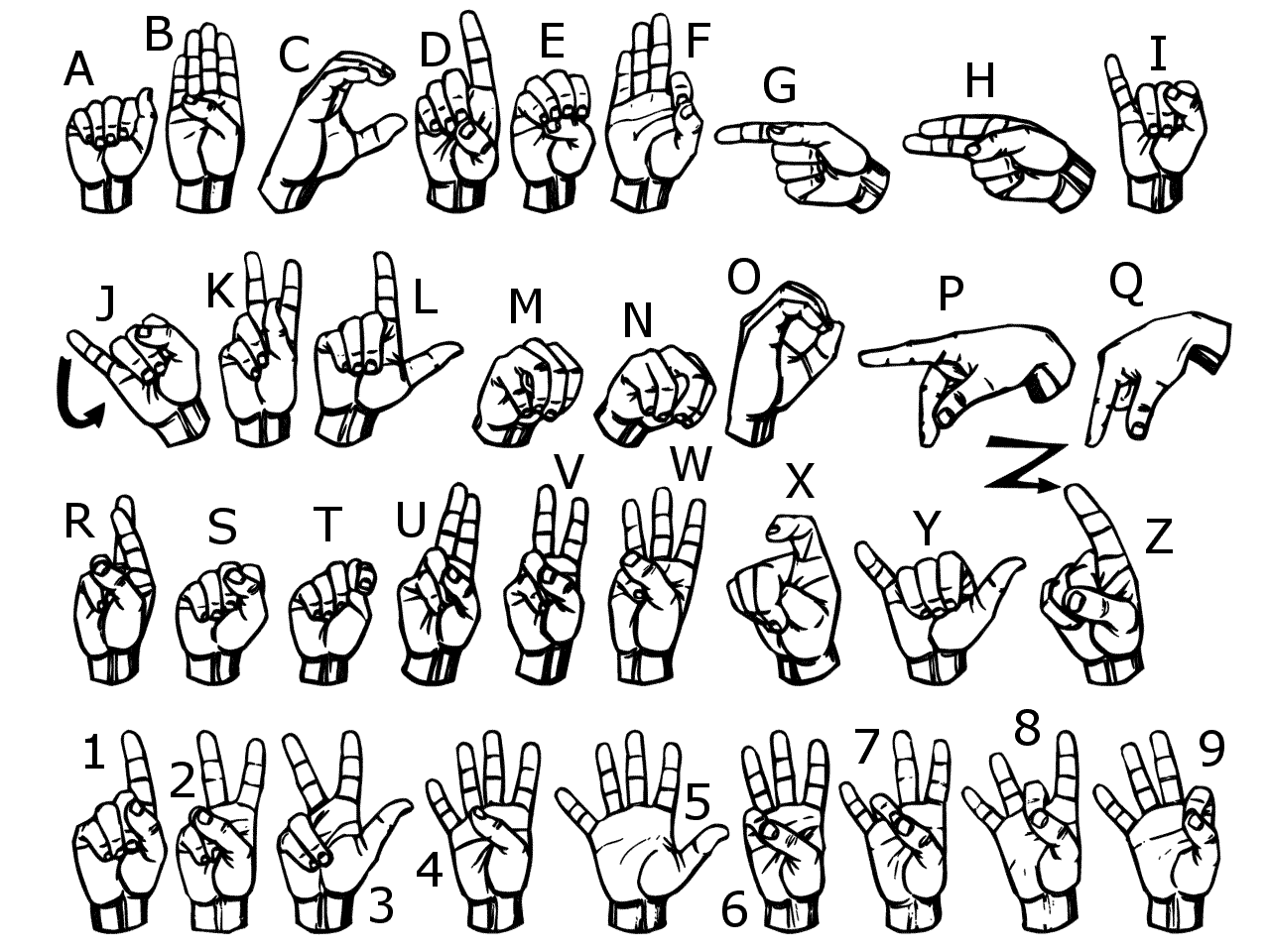
One of the biggest distinction between human-beings to other creatures is that human have hands. Rather than a functional organ, hand can express many meanings, like Thumb means good, index finger means points, two fingers means victory, and a ring with index and thumb means OK. And a sign-language is designed for the deaf, like below:
For me, I do think hands have a strong potential of interactivity, not only among humans, but also a good media between human and machine. So here I decided to design a Robotic Hand, which can do the gestures like human do. Like things as:
If we separated all the tasks, it will be like three parts in total:
- Design a mechanic, flexible robotic hands.
- Arrange its function based on its gesture
- Design the interactivity behind it.
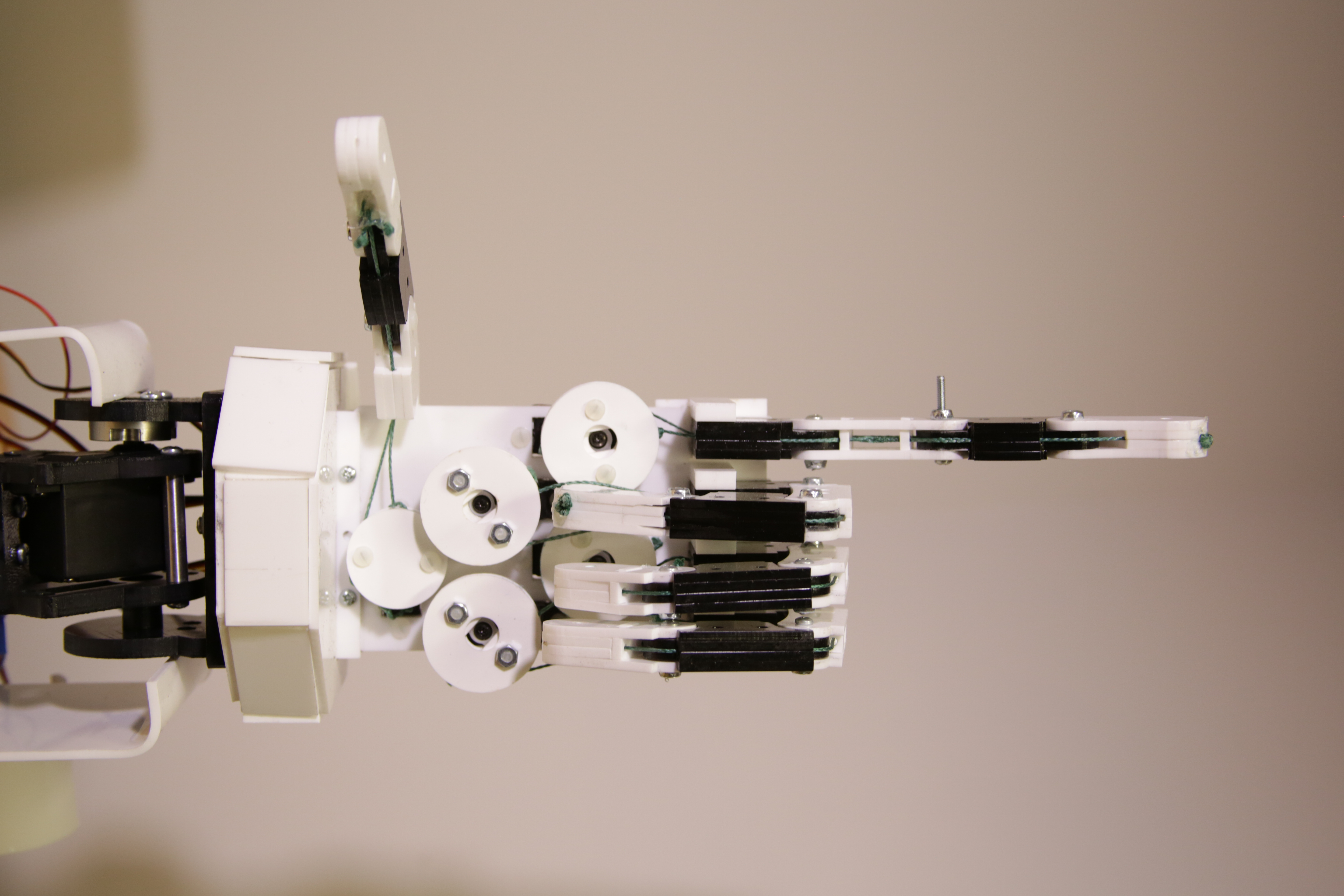
Currently, I’m in the first stage, just finished a functional version of the robotic hands, like below:




Each finger has three sections, with the possibility of bending and straight motivated by Servos. I just finished the mount of servos on Oct 22nd, it works mechanically, and will test its functionality with the control of Computer later. The movement of the hands are as below: